with Touch Dreaming
Humanoid Touch Dream provides a whole-body learning framework for versatile contact-rich humanoid loco-manipulation.
Policy rollouts for cat litter scooping. All videos are played at original speed (1X) unless otherwise noted. Most videos were recorded while the left hand was experiencing intermittent communication failures (see Video 2), shortly before it went fully offline.
Policy rollouts for towel folding. All videos are played at original speed (1X) unless otherwise noted.
Policy rollouts for insert-t with a clearance of 3.5mm. All videos are played at original speed (1X) unless otherwise noted.
Policy rollouts for tea serving. All videos are played at original speed (1X).
Policy rollouts for book organization. All videos are played at original speed (1X) unless otherwise noted.
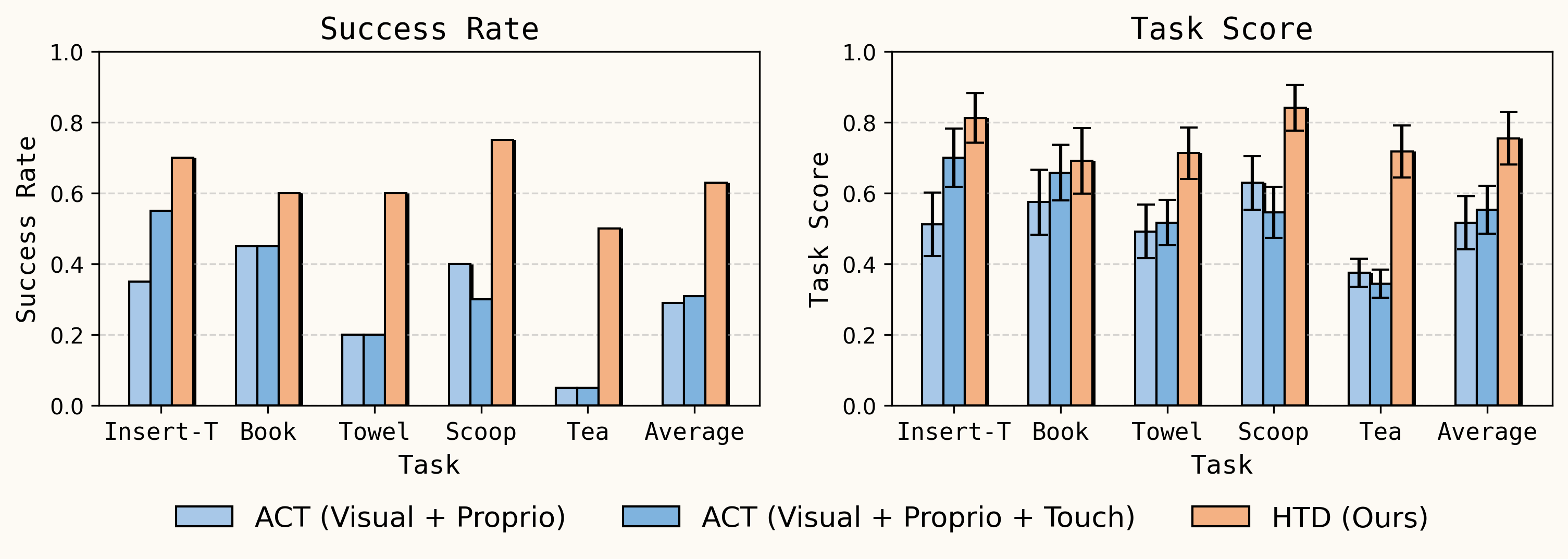
Policy Performance. Comparison of success rate and task score across five contact-rich tasks. HTD (Ours) consistently outperforms ACT baselines with and without touch input, achieving the highest average success rate and task score.
Explore touch dreaming predictions obtained from policy rollouts. This visualization is for analysis only: in practice, the dream experts are not used during deployment.
The left panel shows the robot's head camera view, while the right panel visualizes predicted vs. ground-truth touch signals—switch between Force, Latent Tactile, and Raw Tactile modes. For the latent tactile heatmaps, each latent dimension is independently normalized over the episode, with a minimum-range threshold derived from the most active dimension across all fingers to distinguish active from inactive latent contact regions. Note that this per-dimension normalization amplifies subtle changes and prediction errors in the latent space for better visibility.
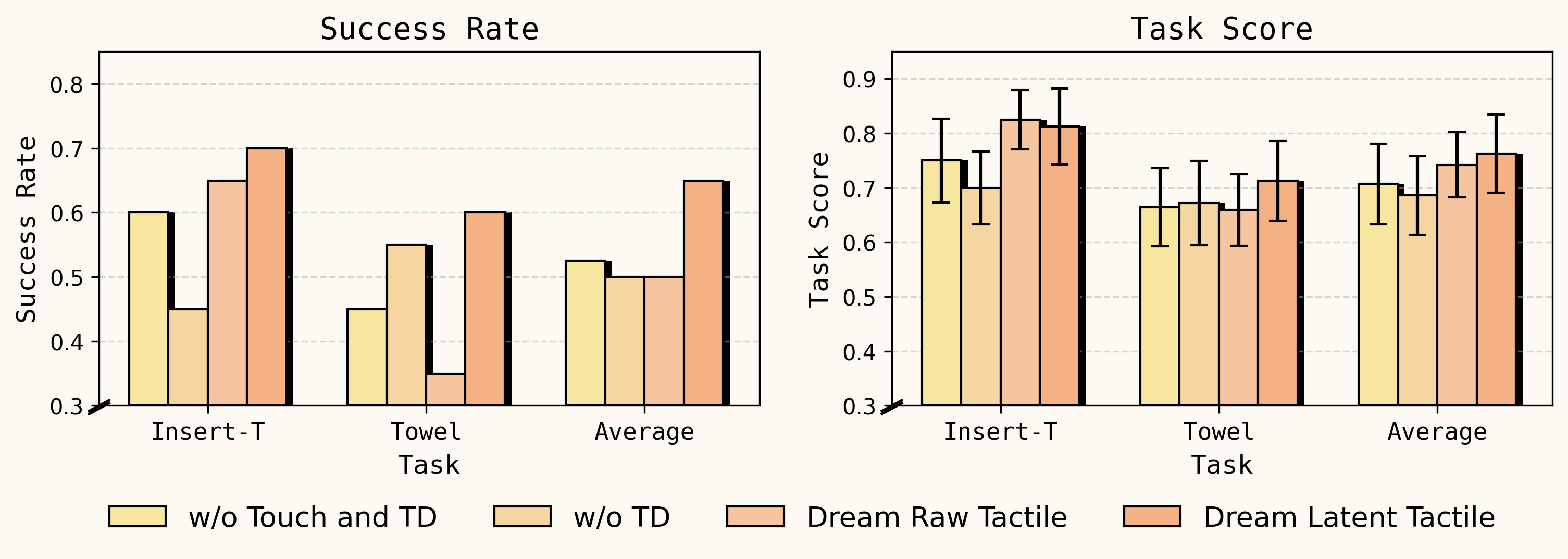
Ablation Study. Effect of touch dreaming on Insert-T and Towel Folding tasks. Dream Latent Tactile achieves the best overall performance, demonstrating the benefit of predicting future latent tactile representations.
Whole-body Controller under Teleoperation. All videos are played at original speed (1X).
| Metric | Ours | AMO | FALCON |
|---|---|---|---|
| Ev (m/s) | 0.1420 ± 0.0568 | 0.1779 ± 0.0642 | 0.1641 ± 0.0309 |
| Eω (rad/s) | 0.1806 ± 0.0534 | 0.1540 ± 0.0316 | 0.1874 ± 0.0263 |
| Eh (m) | 0.0280 ± 0.0438 | 0.0568 ± 0.0814 | 0.1299 ± 0.0082 |
| Ey (rad) | 0.0126 ± 0.0051 | 0.1540 ± 0.0534 | 0.1215 ± 0.0111 |
| Ep (rad) | 0.0487 ± 0.1796 | 0.1519 ± 0.1254 | (not tracked) |
| Er (rad) | 0.0157 ± 0.0065 | 0.0735 ± 0.0447 | (not tracked) |
Tracking Error Comparison. Our whole-body controller achieves the lowest tracking error across most metrics compared to AMO (Li et al., RSS 2025) and FALCON (Zhang et al., L4DC 2026). Bold values indicate the best result in each row.
@misc{niu2026htd,
title={Learning Versatile Humanoid Manipulation with Touch Dreaming},
author={Yaru Niu and Zhenlong Fang and Binghong Chen and Shuai Zhou and Revanth Senthilkumaran and Hao Zhang and Bingqing Chen and Chen Qiu and H. Eric Tseng and Jonathan Francis and Ding Zhao},
year={2026},
eprint={2604.13015},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2604.13015},
}
Demonstrating the HTD teleoperation system to Jensen.